


stm32mpu6050

MPU-6050模块三轴加速度+三轴陀螺仪 6DOF模块GY-521 提供STM32驱

stm32平衡车资料网课件传感器原理MPU6050解算欧拉角T法测速

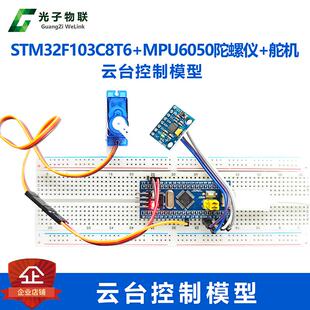
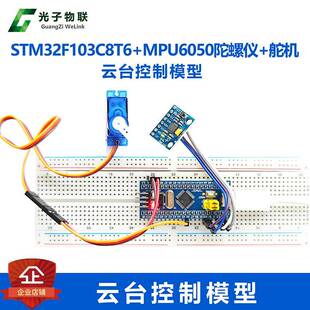
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制

STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制


STM32单片机读取MPU6050模块姿态角度无人机电子DIY设计焊接实现

STM32单片机读取MPU6050模块姿态角度无人机电子DIY设计焊接实现

STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制

STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制

STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制

STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制

STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制

STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制

MPU-6050六轴传感器模块三轴加速度计陀螺仪6DOF STM32自平衡小车

MPU-6050模块三轴加速度+三轴陀螺仪 6DOF模块GY-521 提供STM32驱

STM32单片机读取MPU6050模块姿态角度无人机电子DIY设计焊接实现

STM32F103C8T6系统 核心板 STM32开发板 STM32带MPU6050六轴飞行

MPU6050模块 正点原子 六轴 加速度 传感器 角度 提供STM32源码

STM32F103C8T6系统板MPU6050陀螺仪舵机云台控制模型姿态控制

STM32F103RC F405RG F407ZE控制器CAN MPU6050 MPU9250

STM32F103RC F405RG F407ZE控制器CAN MPU6050 MPU9250
MPU-6050模块三轴加速度+三轴陀螺仪 6DOF模块GY-521 提供STM32驱

MPU6050HMC5883stm32舵机互补滤波算法解算实时姿态PWM控制舵机

MPU6050模块 六轴 加速度 陀螺仪 传感器 角度 提供STM32源码
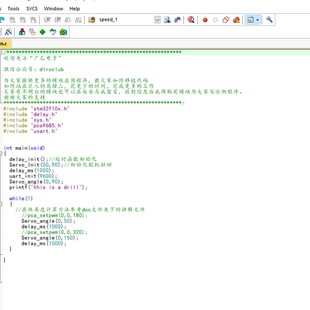
stm32 mpu6050 舵机跟随 源码

stm32 mpu6050 舵机跟随 源码

stm32 mpu6050 舵机跟随 源码

stm32 mpu6050 舵机跟随 源码

6轴MPU6050模块 陀螺仪 DMP引擎 卡尔曼 加速度计 STM32 倾角仪
STM32F103C8T6系统板+MPU6050陀螺仪+舵机云台控制模型 姿态控制
